無人機航測-傾斜解決攝影方案
1- 六旋翼大負載無人機一套���、飛行技能培訓(xùn)
2- 五鏡頭傾斜相機一套���、安裝集成調(diào)試
3- Smart3D一套
(1) Smart3D空三加密和三維建模設(shè)置方法
(2) 工程操作講解(工程創(chuàng)建,JOB路徑配置)
(3) 像控點刺點方法
(4) Samrt3D加像控點和不加像控點的處理方法
(5) 成果提交數(shù)據(jù)格式處理(成果類型介紹,通用OSGB數(shù)據(jù)格式設(shè)置和輸出)
4- EPS一套
(1) 傾斜攝影三維模型導(dǎo)入EPS測圖方法
(2) EPS 采集地物要素的方法
(3) EPS 采集等高線的方法
5- 航測生產(chǎn)技術(shù)培訓(xùn)
以實際項目為例,從航飛路線設(shè)計�、外業(yè)相控選點、CORS站或千尋網(wǎng)測量方法�、飛行注意事項、內(nèi)業(yè)數(shù)據(jù)處理��、EPS數(shù)據(jù)采集等方面綜合培訓(xùn)�。
方案簡介
1. 基于大疆M600傾斜攝影的1:500高精度不動產(chǎn)測量整體解決方案
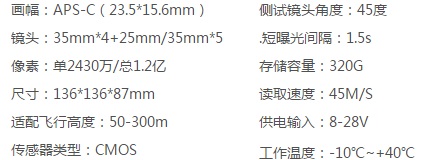
1.傾斜攝影所用無人機參數(shù)和所用軟件
以西安市長安縣常行村為例,傾斜攝影地籍測量所用大疆M600無人機,鏡頭采用采用智繪鷹五鏡頭傾斜攝影相機���,如下圖所示�,三維建模采用Smart 3D軟件,數(shù)據(jù)采集和檢測采用清華山維EPS軟件��。

大疆M600無人機

五鏡頭傾斜相機
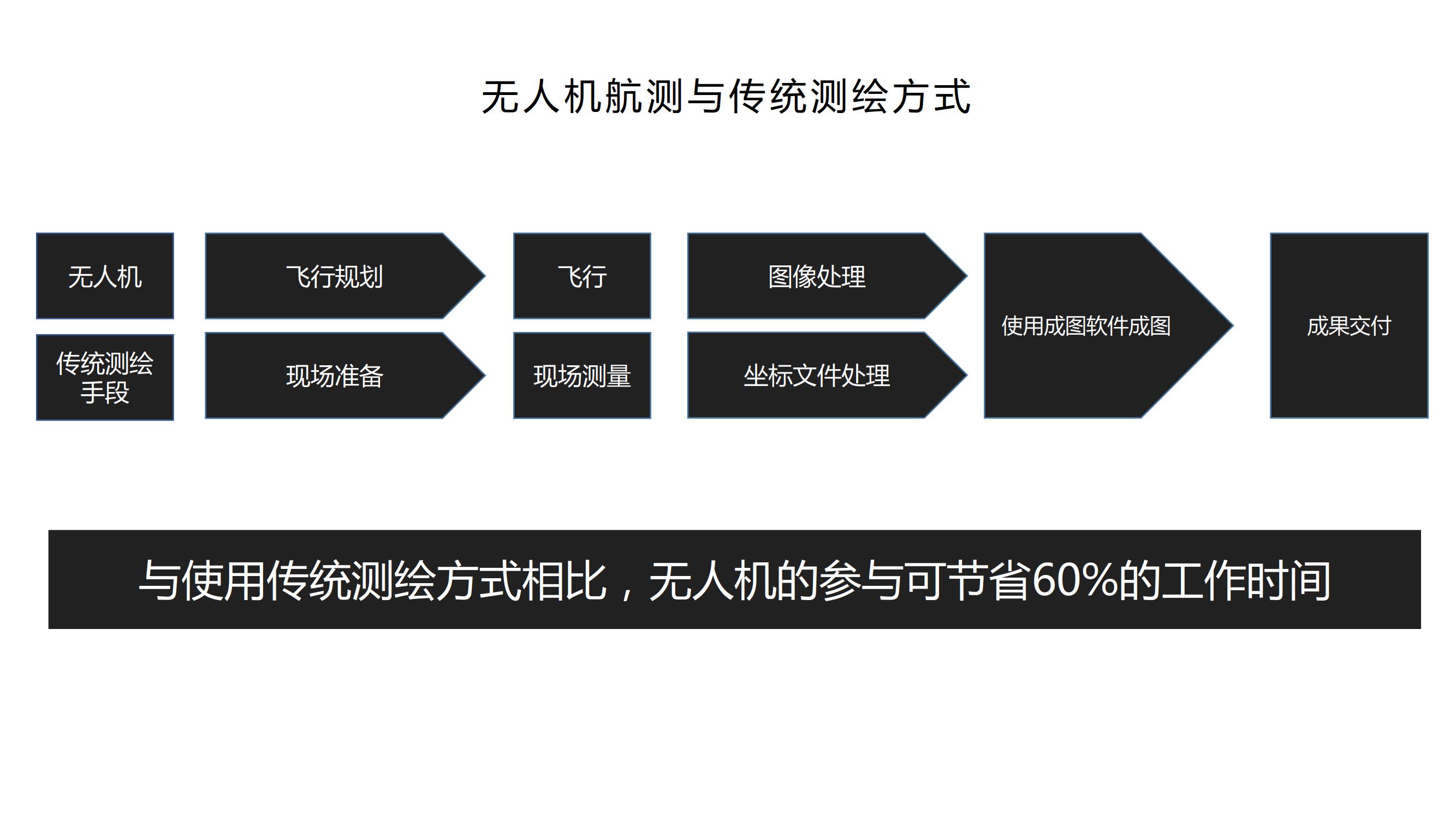
2 項目實施技術(shù)方案
項目實施其步驟分為數(shù)據(jù)采集��、數(shù)據(jù)預(yù)處理�����、數(shù)據(jù)生產(chǎn)等三個階段�����,采用多旋翼無人機進行低空數(shù)據(jù)采集�,通過加載機載差分GPS獲取高精度照片坐標(biāo),數(shù)據(jù)處理采用Smart3D軟件進行傾斜攝影三維建模數(shù)據(jù)處理��,生產(chǎn)實景三維模型及真正射影像��,技術(shù)方案如圖所示�。
2.1數(shù)據(jù)預(yù)處理
依據(jù)項目設(shè)計要求�,進行傾斜影像檢查、飛行質(zhì)量檢查��、控制點檢查���、機載差分GPS數(shù)據(jù)解算等預(yù)處理工作�, 數(shù)據(jù)無誤后,導(dǎo)入Smart3D軟件進行空三加密解算�����。
2.2數(shù)據(jù)生產(chǎn)
2.2.1實景三維模型生產(chǎn)
在smart3D中解算好空三成果之后����,經(jīng)過提交工程、設(shè)定格網(wǎng)大小���、輸出格式設(shè)置等流程�,生產(chǎn)出測區(qū)的實景三維模型成果(OSGB格式)��,根據(jù)實景三維模型���,提交工程�,選擇制作DSM,生產(chǎn)出的正射影像圖

Smart3D生成實景三維模型
2.3大比例尺測圖
完成測區(qū)空三成果��、實景三維模型�、正射影像等數(shù)據(jù)的制作,采用EPS測圖軟件打開實景三維模型�,由作業(yè)員在EPS軟件中進行點��、線��、面測圖��,并按照國標(biāo)要求賦予圖層與屬性信息��。.后采用CASS軟件進行圖形數(shù)據(jù)編輯�,生產(chǎn)大比例尺地形圖數(shù)據(jù)���。
2.4成果精度檢測
2 . 4 . 1 控制點與檢核點選取
控制點資料為外業(yè)人員在測區(qū)范圍內(nèi)獲取9個控制點坐標(biāo)信息��,控制點的選取原則按照九宮格的原則�,坐標(biāo)系為國家2000坐標(biāo)系����。選取其中5個點作為控制點參與實景三維空三加密控制,其余4個點位進行模型成果精度檢測�,并在村子里測量一些建筑物長度進行模型成果精度檢測。如下圖所示;
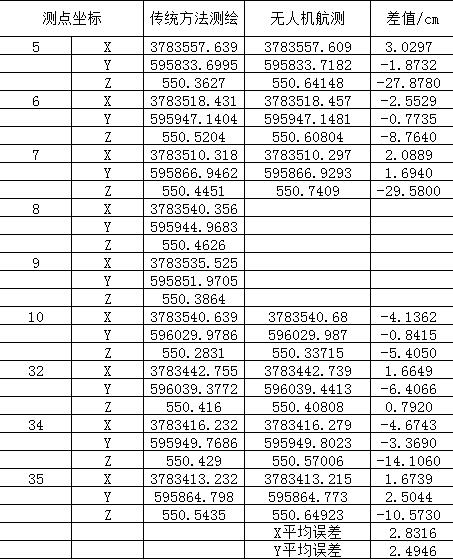
**坐標(biāo)和實測坐標(biāo)對比
邊長測距 | 傳統(tǒng)方法測繪 | 無人機航測 | 差值/CM |
1 | 17.811 | 17.805 | 0.6 |
2 | 6.754 | 6.716 | 3.8 |
3 | 6.538 | 6.582 | -4.4 |
4 | 6.881 | 6.905 | -2.5 |
模型平面邊長精度檢查
采用無人機傾斜攝影建模方法進行1:500不動產(chǎn)測量大比例尺測圖技術(shù)路線具有可行性����,相對邊長誤差均小于5厘米���,精度滿足地籍測量要求�����,通過加載機載差分GPS����,大大減少了地面像控點的布設(shè),采用的裸眼立體測圖技術(shù)以其 率�,高精度,簡單易學(xué)的特點��,廣泛應(yīng)用于地籍測量���,不動產(chǎn)測繪����,城市大比例尺地形圖更新等領(lǐng)域��,是測繪領(lǐng)域的一項革命性的技術(shù)��。