無人機航測-正射影像解決方案
1- RTK 無人機一套、飛行技能培訓(xùn)
2- 差分GPS解算軟件一套�����、差分GPS解算軟件解算流程培訓(xùn)
3- Smart3D一套
(1) Smart3D空三加密和三維建模設(shè)置方法
(2) 工程操作講解(工程創(chuàng)建,JOB路徑配置)
(3) 像控點刺點方法
(4) Samrt3D加像控點和不加像控點的處理方法
(5) 成果提交數(shù)據(jù)格式處理(成果類型介紹,通用OSGB數(shù)據(jù)格式設(shè)置和輸出)
4- EPS一套
(1) 傾斜攝影三維模型導(dǎo)入EPS測圖方法
(2) EPS 采集地物要素的方法
(3) EPS 采集等高線的方法
5- 航測生產(chǎn)技術(shù)培訓(xùn)
以實際項目為例�,從航飛路線設(shè)計、外業(yè)相控選點��、CORS站或千尋網(wǎng)測量方法�、飛行注意事項、內(nèi)業(yè)數(shù)據(jù)處理��、EPS數(shù)據(jù)采集等方面綜合培訓(xùn)
方案簡介
1. 基于大疆4PRTK的1:500地形圖生產(chǎn)
整體解決方案
(1) 技術(shù)路線
1.1
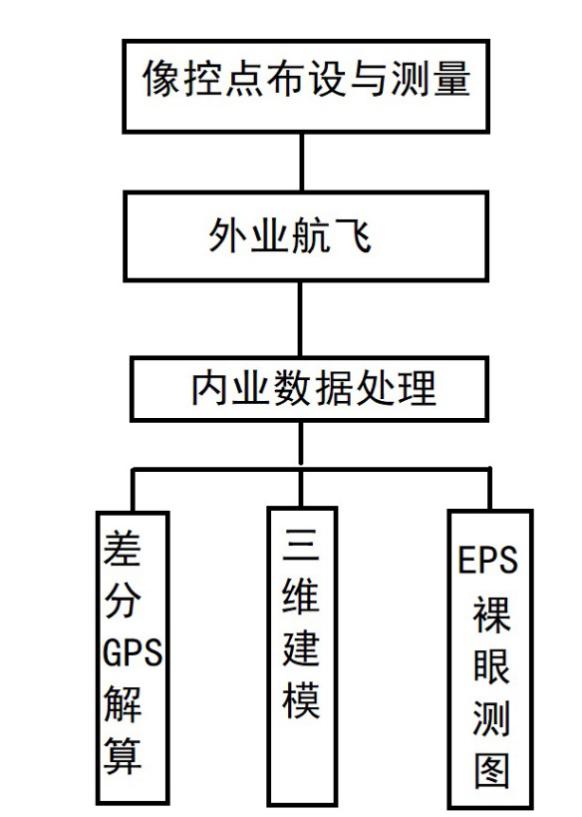
整體技術(shù)路線如下圖所示:
1.2以陜西省韓城某區(qū)域1:500地形圖測量為例�,測區(qū)面積0.6平方公里。
如圖所示為:

整個數(shù)據(jù)生產(chǎn)包括如下步驟:
(1) 像控點布設(shè)與測量:該地形圖為帶狀�,沿周邊布設(shè)像控點12個,測區(qū)內(nèi)布設(shè)像控點3個�����,并用千尋網(wǎng)測量
(1) 無人機外業(yè)航飛:在4PRTK地面站上新建工程,導(dǎo)入預(yù)先設(shè)計好的kml文件(kml指測區(qū)范圍文件���,也可以現(xiàn)場規(guī)劃飛行區(qū)域)�����;航高120米�����,設(shè)置為等距拍照����,重疊率航向80%��,旁向60%�����;打開地面站上鏡頭的畸變糾正
(2) 內(nèi)業(yè)數(shù)據(jù)處理:
差分GPS解算:利用機載差分GPS軟件進行解算��,得到相片的差分數(shù)據(jù)
三維建模:在smart3d中����,首先新建工程���,導(dǎo)入相片后將差分GPS數(shù)據(jù)導(dǎo)入,設(shè)置好路徑后進行空三加密�����,然后刺像控點����,再跑空三�����,.后進行三維建模�����。如下圖所示:
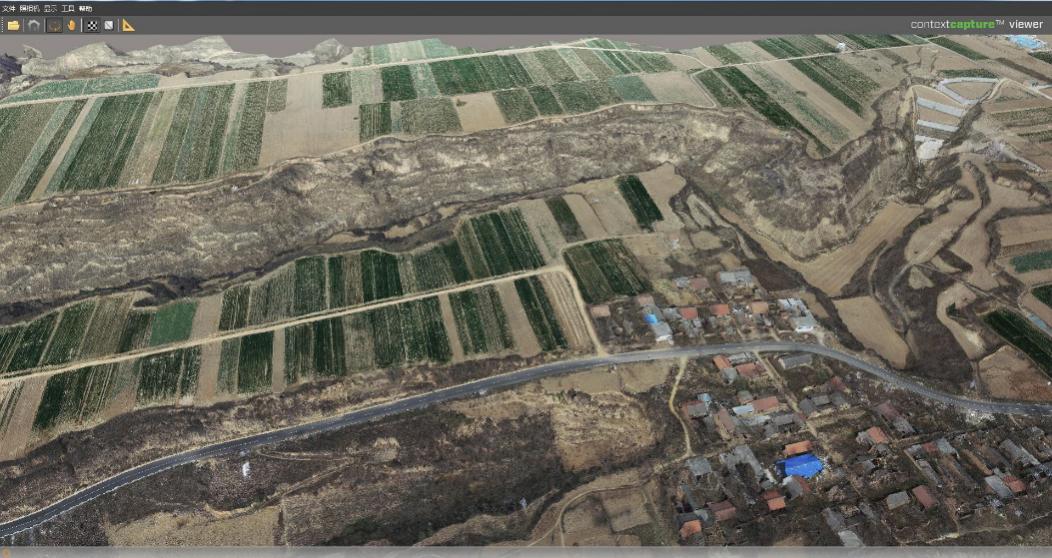
Smart3D三維建模
三維測圖:將三維建模導(dǎo)出OSGB數(shù)據(jù)格式�,導(dǎo)入EPS進行裸眼立體測圖。EPS裸眼立體測圖技術(shù)流程如下:
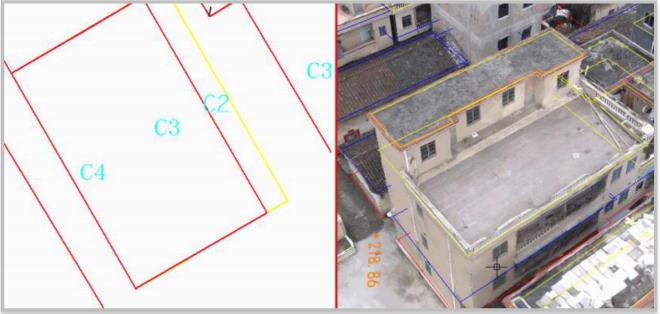
EPS裸眼立體測圖
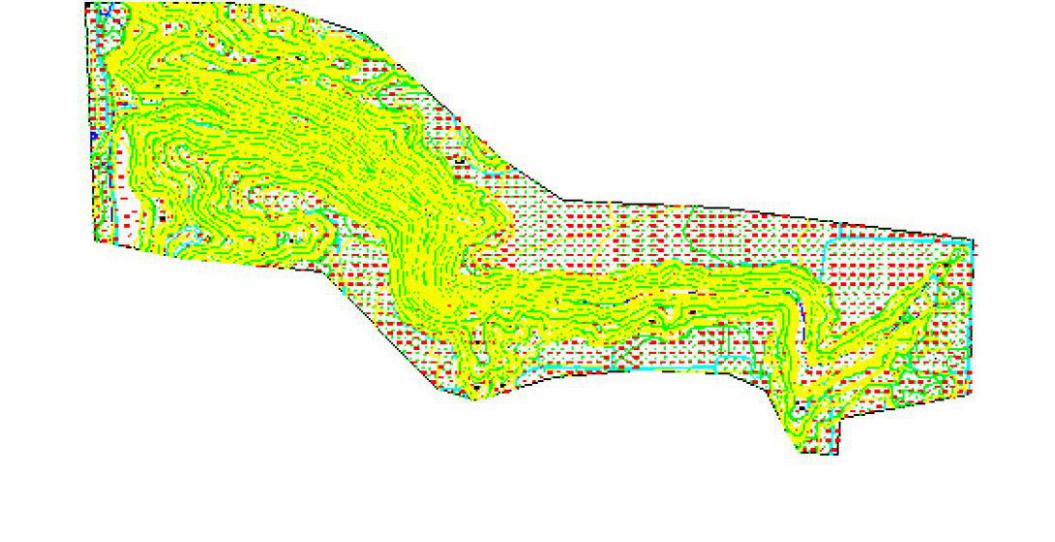
EPS:500地形圖采編